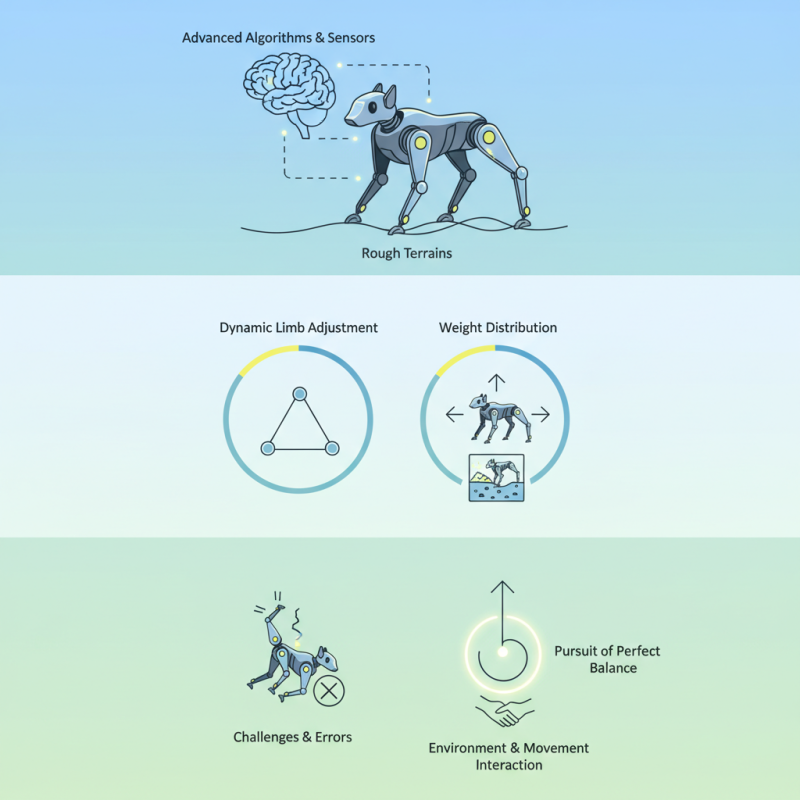
Quadruped robots are fascinating innovations in robotics. They mimic animal movement, enabling them to traverse rough terrains. Key to their success is understanding "How does a quadruped robot maintain balance." Dr. Alice Chen, a leading expert in the field, emphasizes, “Balance is the cornerstone for any mobile robot.”
These robots utilize advanced algorithms and sensors to gauge their surroundings. They dynamically adjust their limbs, responding to changes in weight distribution. For instance, when walking on uneven ground, a quadruped must quickly adapt to maintain stability. Yet, despite these advancements, challenges remain. Errors can lead to falls, revealing limitations in technology.
The pursuit of perfect balance is ongoing. Engineers constantly refine their designs and control systems. Dr. Chen’s insights remind us: achieving reliable stability is not just about technology. It involves understanding the intricate interactions between environment and movement. Quadruped robots hold great promise, but their journey to flawless balance continues.
Quadruped robots utilize several mechanisms to maintain balance effectively. These robots mimic the dynamics of animals. They adjust the positions of their limbs dynamically while walking or running. Sensors play a crucial role in this balance. They gather real-time data about the robot's position and movements.
Leg design is essential. Each leg must provide stability and mobility. Some robots have flexible joints that adapt to uneven surfaces. This adaptability helps them navigate various terrains. For instance, when a leg encounters an obstacle, it can shift its weight to the opposite side. Balancing correctly involves constant adjustments. The robot must learn from previous actions to improve its stability.
Tips: Regularly test your robot in different environments. Understanding how it reacts to challenges enhances its balance. Another tip is to implement feedback loops. These help the robot learn and adapt while moving. It's not always perfect, which presents areas for improvement. Sometimes, a robot may falter. These moments are valuable for refining balance mechanisms. Engaging with failures leads to better designs and performance.
: They mimic animal dynamics and adjust limb positions while moving.
Sensors collect real-time data about position and movements for stability.
Each leg must provide stability and adaptability for uneven surfaces.
Feedback loops help robots learn from previous movements to improve balance.
Sensors can drift over time, leading to inaccurate balance adjustments.
Yes, they help detect obstacles but may fail in low-light conditions.
Focus on sensor quality and incorporate redundancy in control systems.
Regularly testing in different conditions exposes weaknesses and aids refinement.
These moments highlight areas for improvement in their balance mechanisms.
A single sensor can disrupt the entire stability system, so analyze outputs carefully.
Quadruped robots maintain balance through a combination of sophisticated mechanisms and advanced algorithms. Central to this process is the integration of various sensors that monitor the robot's position, orientation, and environmental conditions. These sensors provide real-time data, which is crucial for making quick adjustments to maintain stability, especially when navigating complex terrains.
In exploring how does a quadruped robot maintain balance, it's evident that the algorithms programmed into these robots play a vital role in dynamic movement and balance adjustment. By analyzing terrain impacts, successful designs can be achieved that enhance stability and adaptability. Case studies illustrate how these principles are effectively applied in various quadruped robot models, showcasing impressive balance and mobility capabilities under diverse conditions.
